Autonomous Maze Solving Robot
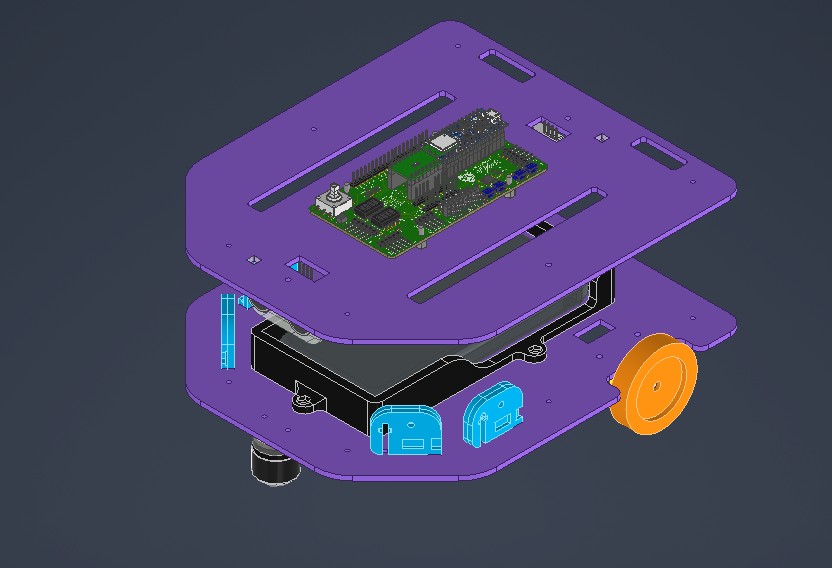
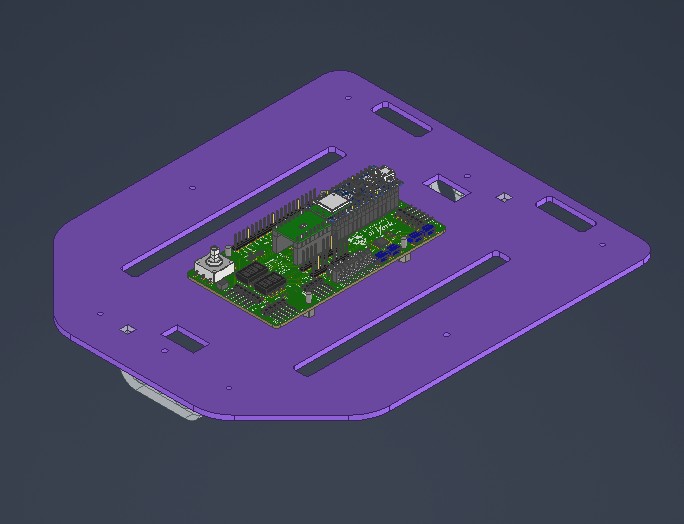
A fully autonomous differential-drive robot with a custom-built chassis, using the Arduino Nano 33 BLE to navigate unknown maze environments.
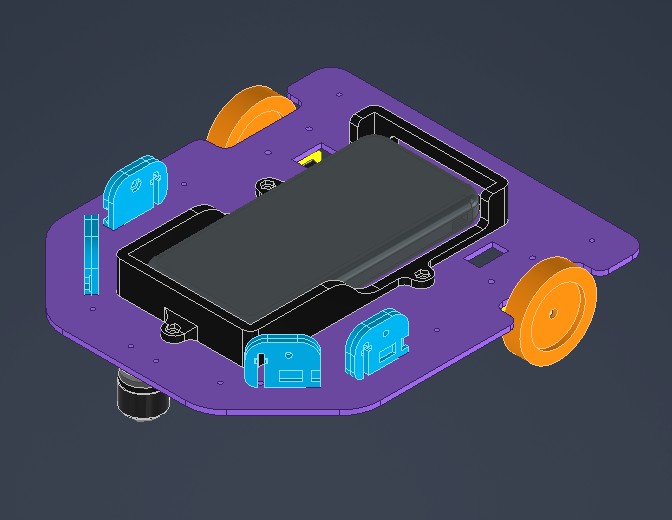
Houses 4 infrared sensors, 2 ultrasonic sensors, 2 motors, and a custom-built battery pack holder.
Skills: Embedded C++ | Robotics | FSMs | Sensor Fusion | Wheel Odometry | Gyroscope Integration | Bluetooth Communication